from nbdev.config import get_configTensor Quaternion Module
Pytorch Models for Sequential Data
Quaternion Type
TensorQuaternionAngle
TensorQuaternionAngle (x, **kwargs)
A Tensor which support subclass pickling, and maintains metadata when casting or after methods
TensorQuaternionInclination
TensorQuaternionInclination (x, **kwargs)
A Tensor which support subclass pickling, and maintains metadata when casting or after methods
project_root = get_config().config_file.parent
f_path = project_root / 'test_data/orientation'hdf_files = get_hdf_files(f_path)
tfm_src = CreateDict([DfHDFCreateWindows(win_sz=1000,stp_sz=100,clm='acc_x')])
u = ['acc_x','acc_y','acc_z','gyr_x','gyr_y','gyr_z']
# u = ['acc_x','acc_y','acc_z','gyr_x','gyr_y','gyr_z','mag_x','mag_y','mag_z']
y =['opt_a','opt_b','opt_c','opt_d']
dls = DataBlock(blocks=(SequenceBlock.from_hdf(u,TensorSequencesInput),
SequenceBlock.from_hdf(y,TensorQuaternionInclination)),
get_items=tfm_src,
splitter=RandomSplitter(0.1)
).dataloaders(hdf_files,shufflish=True,bs=128)Basic Operations
tq1 = tensor([
[1,0,0,0],
[0.5,0.5,0.5,0.5],
])
tq2 = tensor([
[0.5,0.5,0.5,0.5],
[0.5,0.5,0.5,0.5],
])
tq1.shapetorch.Size([2, 4])rad2deg
rad2deg (t)
test_eq(float(rad2deg(_pi)),180)ScriptFunction object at 0x7f83233af100>
quat1quat2*
# q = tq1.repeat(1000,1)# %%timeit
# torch.cumprod(q,dim=-1)# %%timeit
# [q*q for _ in range(1000)]test_eq(multiplyQuat(tq1,tq2),tensor([[ 0.5000, 0.5000, 0.5000, 0.5000],
[-0.5000, 0.5000, 0.5000, 0.5000]]))norm_quaternion
norm_quaternion (q)
test_eq(norm_quaternion(tq1*5),tq1)
test_eq(norm_quaternion(tq1/_pi),tq1)
test_eq(norm_quaternion(tq1[None,...]),tq1[None,...])conjQuat
conjQuat (q)
test_eq(conjQuat(tq1),tensor([[ 1.0000, -0.0000, -0.0000, -0.0000],
[ 0.5000, -0.5000, -0.5000, -0.5000]]))ScriptFunction object at 0x7f83234a8220>
quat1inv(quat2)*
diffQuat
diffQuat (q1, q2, norm=True)
test_eq(diffQuat(tq1,tq2),diffQuat(tq1,tq2*5))
test_ne(diffQuat(tq1,tq2),diffQuat(tq1,tq2*5,norm=False))
test_ne(diffQuat(tq1,tq2),diffQuat(tq1[None,...],tq2[None,...]))safe_acos
safe_acos (t, eps=4e-08)
numericaly stable variant of arcuscosine
test_ne(safe_acos(tensor(1.))*1e6,0)
test_eq(safe_acos(tensor(-0.)),_pi/2)safe_acos_double
safe_acos_double (t, eps=1e-16)
numericaly stable variant of arcuscosine, uses 64bit floats for internal computation for increased accuracy and gradient propagation
test_ne(safe_acos_double(tensor(1.))*1e6,0)
test_eq(safe_acos_double(tensor(-0.)),_pi/2)relativeAngle
relativeAngle (q1, q2)
inclinationAngle
inclinationAngle (q1, q2)
print('inclination:', rad2deg(inclinationAngle(tq1,tq2)))
print('relative:', rad2deg(relativeAngle(tq1,tq2)))inclination: tensor([9.0000e+01, 1.7075e-06])
relative: tensor([1.2000e+02, 1.7075e-06])pitchAngle
pitchAngle (q1, q2)
rollAngle
rollAngle (q1, q2)
print('roll:', rad2deg(rollAngle(tq1,tq2)))
print('pitch:', rad2deg(pitchAngle(tq1,tq2)))roll: tensor([0., 0.])
pitch: tensor([-90., 0.])inclinationAngleAbs
inclinationAngleAbs (q)
rad2deg(inclinationAngleAbs(tq1))tensor([ 0., 90.])rand_quat
rand_quat ()
rot_vec
rot_vec (v, q)
g = tensor([[9.81,0,0]]*5)r_quat = rand_quat()
rot_vec(g,r_quat)tensor([[ 1.3754, 7.8102, -5.7746],
[ 1.3754, 7.8102, -5.7746],
[ 1.3754, 7.8102, -5.7746],
[ 1.3754, 7.8102, -5.7746],
[ 1.3754, 7.8102, -5.7746]])quatFromAngleAxis
quatFromAngleAxis (angle, axis)
quatInterp
quatInterp (quat, ind, extend=False)
*Interpolates an array of quaternions of (non-integer) indices using Slerp. Sampling indices are in the range 0..N-1, for values outside of this range, depending on “extend”, the first/last element or NaN is returned.
See also csg_bigdata.dp.utils.vecInterp.
:param quat: array of input quaternions (N(xB)x4) :param ind: vector containing the sampling indices, shape (M,) :param extend: if true, the input data is virtually extended by the first/last value :return: interpolated quaternions (Mx4)*
1e-3/_pi*180tensor([0.0573])q = torch.rand((1000000,1,4))*2-1
q /= q.norm()
x = torch.linspace(0,q.shape[0]-1,150001)
q_i = quatInterp(q,x)
torch.isnan(inclinationAngleAbs(q_i)).sum()tensor(0)q_i = quatInterp(q,x)plt.figure()
plt.plot(inclinationAngleAbs(q))
plt.plot(x,inclinationAngleAbs(q_i))
Loss Functions
inclination_loss
inclination_loss (q1, q2)
inclination_loss(tq1,tq2)tensor(0.2071)inclination_loss_abs
inclination_loss_abs (q1, q2)
inclination_loss_abs(tq1,tq2)tensor(0.1464)inclination_loss_squared
inclination_loss_squared (q1, q2)
# %%timeit
inclination_loss_squared(tq1,tq2)tensor(0.0429)inclination_loss_smooth
inclination_loss_smooth (q1, q2)
# %%timeit
inclination_loss_smooth(tq1,tq2)tensor(0.0214)abs_inclination
abs_inclination (q1, q2)
abs_inclination(tq1,tq2)tensor(0.7854)ms_inclination
ms_inclination (q1, q2)
ms_inclination(tq1,tq2)tensor(1.2337)rms_inclination
rms_inclination (q1, q2)
rms_inclination(tq1,tq2)tensor(1.1107)smooth_inclination
smooth_inclination (q1, q2)
smooth_inclination(tq1,tq2)tensor(0.5354)rms_inclination_deg
rms_inclination_deg (q1, q2)
rms_inclination_deg(tq1,tq2)tensor([63.6396])rms_pitch_deg
rms_pitch_deg (q1, q2)
rms_pitch_deg(tq1,tq2)tensor([63.6396])rms_roll_deg
rms_roll_deg (q1, q2)
rms_roll_deg(tq1,tq2)tensor([0.])mean_inclination_deg
mean_inclination_deg (q1, q2)
mean_inclination_deg(tq1,tq2)tensor([45.])angle_loss
angle_loss (q1, q2)
angle_loss_opt
angle_loss_opt (q1, q2)
ms_rel_angle
ms_rel_angle (q1, q2)
ms_rel_angle(tq1,tq2)tensor(2.1932)abs_rel_angle
abs_rel_angle (q1, q2)
rms_rel_angle_deg
rms_rel_angle_deg (q1, q2)
rms_rel_angle_deg(tq1,tq2)tensor([84.8528])mean_rel_angle_deg
mean_rel_angle_deg (q1, q2)
mean_rel_angle_deg(tq1,tq2)tensor([60.])deg_rmse
deg_rmse (inp, targ)
Callbacks
In order to assure that the output of the model are close to unit quaternions the distance will be added to the loss
QuaternionRegularizer
QuaternionRegularizer (reg_unit=0.0, detach=False, modules=None, every=None, remove_end=True, is_forward=True, cpu=True, include_paramless=False, hook=None)
Callback that adds AR and TAR to the loss, calculated by output of provided layer
augmentation_groups
augmentation_groups (u_groups)
returns the rotation list corresponding to the input groups
u_raw_groups = [3,3]
test_eq(augmentation_groups(u_raw_groups),[[0,2],[3,5]])QuaternionAugmentation
QuaternionAugmentation (inp_groups, **kwargs)
A transform that before_call its state at each __call__
n_skip = 2**8
inp,out = get_inp_out_size(dls)
# model = SimpleGRU(inp,out,num_layers=1,hidden_size=100)
model = TCN(inp,out,hl_depth=8,hl_width=10)
skip = partial(SkipNLoss,n_skip=n_skip)
metrics=rms_inclination_deg
cbs = [QuaternionRegularizer(reg_unit=1,modules=[model])]
lrn = Learner(dls,model,loss_func=ms_inclination,opt_func=ranger,metrics=metrics)/opt/homebrew/Caskroom/miniforge/base/envs/env_tsfast/lib/python3.10/site-packages/torch/nn/utils/weight_norm.py:143: FutureWarning: `torch.nn.utils.weight_norm` is deprecated in favor of `torch.nn.utils.parametrizations.weight_norm`.
WeightNorm.apply(module, name, dim)lrn.fit_one_cycle(1,lr_max=3e-3)| epoch | train_loss | valid_loss | rms_inclination_deg | time |
|---|---|---|---|---|
| 0 | 2.289876 | 1.290059 | 65.076988 | 00:01 |
/var/folders/pc/13zbh_m514n1tp522cx9npt00000gn/T/ipykernel_31206/3976315585.py:9: UserWarning: Float64 precision not supported on mps:0 device. Falling back to float32. This may reduce numerical accuracy of quaternion operations. Error: Cannot convert a MPS Tensor to float64 dtype as the MPS framework doesn't support float64. Please use float32 instead.
warnings.warn(f"Float64 precision not supported on {t.device} device. Falling back to float32. This may reduce numerical accuracy of quaternion operations. Error: {e}")Resampling Model
Quaternion_ResamplingModel
Quaternion_ResamplingModel (model, fs_targ, fs_mean=0, fs_std=1, quaternion_sampling=True)
*Module that resamples the signal before and after the prediction of its model. Usefull for using models on datasets with different samplingrates.
sampling_method: method used for resampling [‘resample’,‘interpolate’]*
# dls = DataBlock(blocks=(SequenceBlock.from_hdf(u + ['dt'],TensorSequencesInput),
# SequenceBlock.from_hdf(y,TensorQuaternionInclination)),
# get_items=tfm_src,
# splitter=ApplyToDict(FuncSplitter(lambda o: 'experiment2' in str(o)))
# ).dataloaders(hdf_files,shufflish=True,bs=128)
# model = TCN(inp,out,hl_depth=8,hl_width=10)
# Learner(dls,Quaternion_ResamplingModel(model,10,quaternion_sampling=False),loss_func=ms_inclination).fit(1)Quaternion Datablock
HDF2Quaternion
HDF2Quaternion (clm_names, clm_shift=None, truncate_sz=None, to_cls=<function noop>, cached=True, fs_idx=None, dt_idx=None, fast_resample=True)
Delegates (__call__,decode,setup) to (encodes,decodes,setups) if split_idx matches
QuaternionBlock
QuaternionBlock (seq_extract, padding=False)
A basic wrapper that links defaults transforms for the data block API
tfm_src = CreateDict([DfResamplingFactor(2000/7,np.linspace(50,500,10)),DfHDFCreateWindows(win_sz=1000,stp_sz=100,clm='acc_x')])
dls = DataBlock(blocks=(SequenceBlock.from_hdf(u,TensorSequencesInput),
QuaternionBlock.from_hdf(y)),
get_items=tfm_src,
splitter=RandomSplitter(0.5)
).dataloaders(hdf_files,bs=2)#test_eq(len(dls.items),83877)Inclination Datablock
TensorInclination
TensorInclination (x, **kwargs)
A Tensor which support subclass pickling, and maintains metadata when casting or after methods
HDF2Inclination
HDF2Inclination (clm_names, clm_shift=None, truncate_sz=None, to_cls=<function noop>, cached=True, fs_idx=None, dt_idx=None, fast_resample=True)
Delegates (__call__,decode,setup) to (encodes,decodes,setups) if split_idx matches
InclinationBlock
InclinationBlock (seq_extract, padding=False)
A basic wrapper that links defaults transforms for the data block API
# f_paths = '/mnt/Data/Systemidentification/Orientation_Estimation/'
# hdf_files = get_hdf_files(f_paths)
# tfm_src = CreateDict([DfHDFCreateWindows(win_sz=1000,stp_sz=100,clm='acc_x')])
# u = ['acc_x','acc_y','acc_z','gyr_x','gyr_y','gyr_z']
# # u = ['acc_x','acc_y','acc_z','gyr_x','gyr_y','gyr_z','mag_x','mag_y','mag_z']
# y =['opt_a','opt_b','opt_c','opt_d']
# dls = DataBlock(blocks=(SequenceBlock.from_hdf(u),
# InclinationBlock.from_hdf(y)),
# get_items=tfm_src,
# splitter=ApplyToDict(FuncSplitter(lambda o: 'experiment2' in str(o)))
# ).dataloaders(hdf_files,shufflish=True,bs=128)Show Results
plot_scalar_inclination
plot_scalar_inclination (axs, in_sig, targ_sig, out_sig=None, **kwargs)
plot_quaternion_inclination
plot_quaternion_inclination (axs, in_sig, targ_sig, out_sig=None, **kwargs)
plot_quaternion_rel_angle
plot_quaternion_rel_angle (axs, in_sig, targ_sig, out_sig=None, **kwargs)
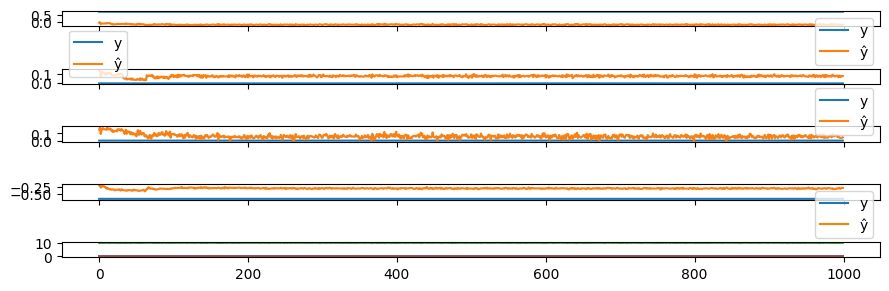
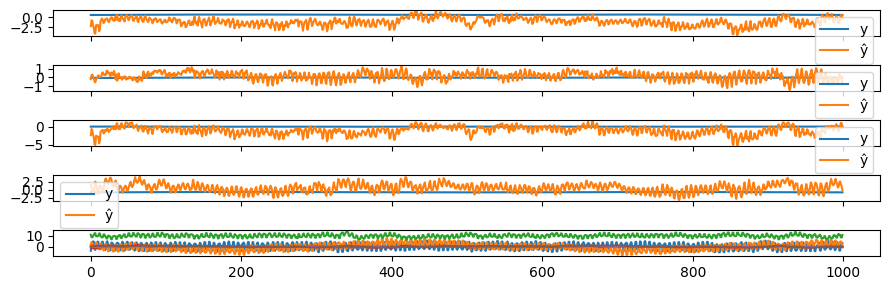
dls.show_batch(max_n=3,ds_idx=0)
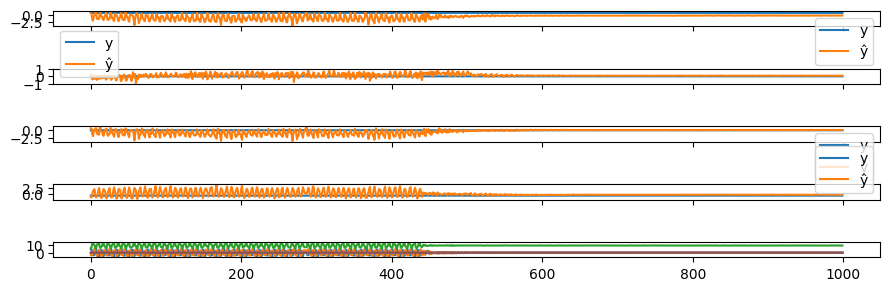
lrn.show_results(max_n=3,ds_idx=0,shuffle=True,quat=True)/var/folders/pc/13zbh_m514n1tp522cx9npt00000gn/T/ipykernel_31206/3976315585.py:9: UserWarning: Float64 precision not supported on mps:0 device. Falling back to float32. This may reduce numerical accuracy of quaternion operations. Error: Cannot convert a MPS Tensor to float64 dtype as the MPS framework doesn't support float64. Please use float32 instead.
warnings.warn(f"Float64 precision not supported on {t.device} device. Falling back to float32. This may reduce numerical accuracy of quaternion operations. Error: {e}")